ロボットがテニスをマスター:不完全な人間の動きからAI学習
清華大学や北京大学の研究者らが開発したLATENTプロジェクトは、人間の不完全な動きデータからロボットがテニスを自主学習します。この技術はAlphaZeroに似ており、物理世界での応用を示します。ロボットUnitree G1が実証しました。
ロボットがテニスに挑戦する理由は?
過去、Deep Blueがカスパロフを破りました。次にGoやStarCraftでアルゴリズムが勝利しました。今、ロボットがテニスを征服します。
テニスは速度と精度が求められます。ロボットにとって最大の挑戦です。
LATENTプロジェクトとは何ですか?
LATENTはLearn Athletic humanoid TEnnis skills from imperfect human Motion daTaの略です。ロボットが自らテニスを学びます。
清華大学や北京大学の研究者が協力しました。AlphaZeroのような自己学習を使います。
不完全な動きデータはどう活用?
完璧なテニスデータは高価です。研究者は「原始スキル」データを収集しました。
- フォアハンド(drive)
- バックハンド
- 横移動
コートはプロの1/17サイズです。複雑さを減らしました。
ロボットはどう学習し修正?
少ないデータでロボットがエラーを修正します。体勢を安定させます。
ラケット角度をミリ単位で調整します。人間の動きを模倣します。
奇妙な動きを防ぐ方法は?
強化学習で変な動作を避けます。初期データ分布に基づきます。
人間らしい探索のみ許可します。
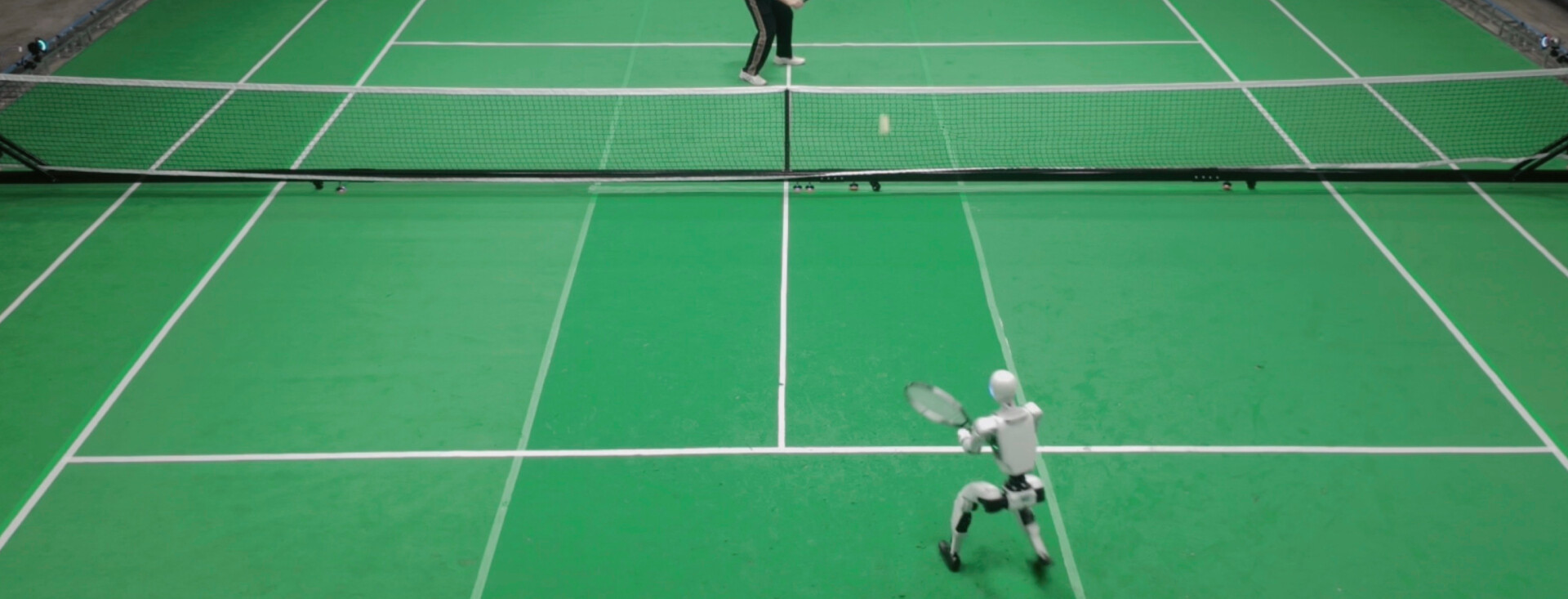
Unitree G1の実証結果は?
Unitree G1にシステムを搭載しました。29自由度を持ち、3Dプリントラケットを使います。
| 性能 | 詳細 |
|---|---|
| 速度 | 15m/s(54km/h)以上のボールを返す |
| 対応 | 人間とのラリー可能、実コートで |
| 動作 | コートカバー、姿勢動的調整 |
将来の影響は何か?
プロ選手には及ばないが、可能性を示します。チェスやGoの手法が物理に応用可能です。
基本動作からあらゆる身体スキルを学習できます。
FAQ
- データ収集はどう?ミニテニスコートで原始スキルを記録。
- 他のスポーツは?ピンポンや功夫で類似進展あり。
- 限界は?まだ人間プロに劣るが、基盤技術。