NASAのパースビアランス・ローバー、AIによる初の火星自律航行ルート計画を達成
近年、**人工知能(AI)**は画像生成や分析を超え、物理世界に影響を与える意思決定へ進化しています。**NASA JPL**は、**Perseverance**ローバーが**AI**で計画した初の火星上ルートを走行完了したと発表しました。これにより、惑星探査の自律化が現実味を帯びています。(約40語)
AIが実行した具体的な役割
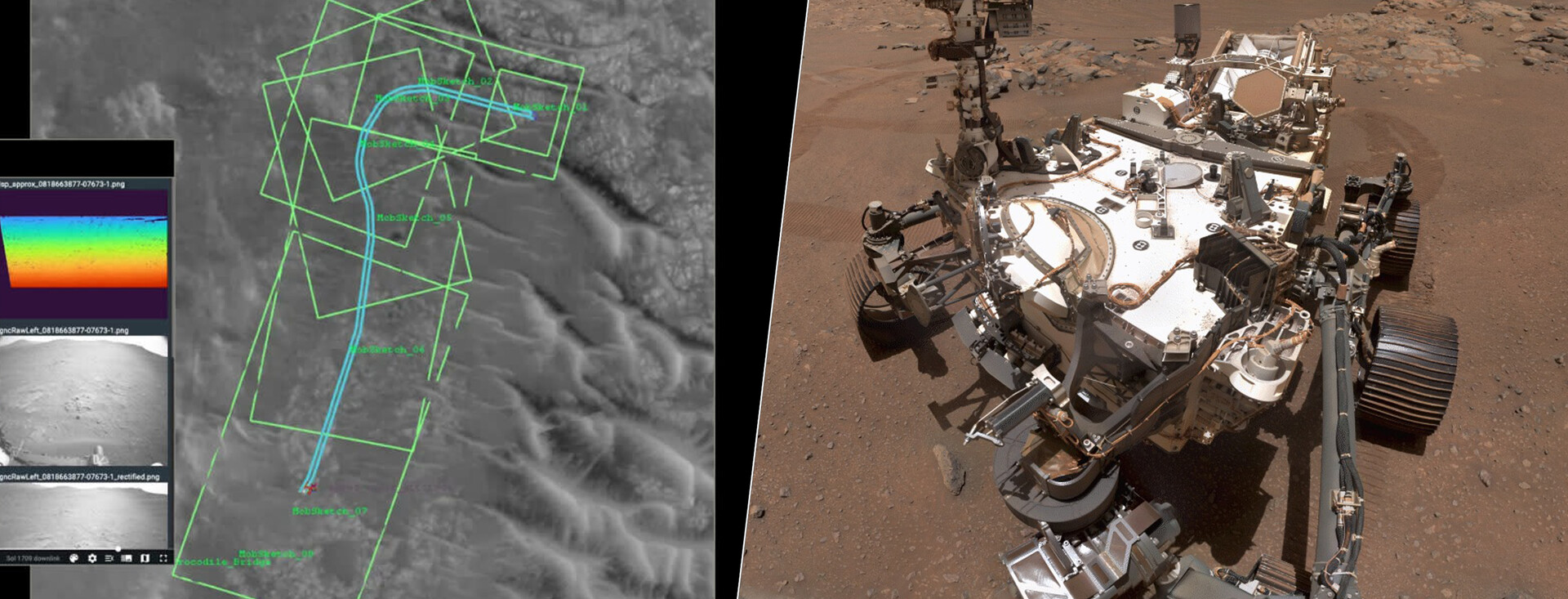
**AI**のテストは、2025年12月8日と10日に、Jezeroクレーター内で実施されました。チームは視覚機能を備えた**AI**モデルを導入し、waypoints(中間経路点)を提案。これを基にローバーへの走行計画を作成しました。通常は専門家が手動で行う作業を、**JPL**の運用センター主導と**Anthropic**との協力で実現。複雑地帯での安全航行を可能にしました。
火星探査の基本的な制約
火星は地球から平均2億2500万キロメートル離れており、リアルタイム制御は不可能です。**JPL**によると、通信遅延のため、地形分析後、経路を区切ってRed del Espacio Profundo経由で指示を送ります。ローバーが実行し、後で結果を確認する従来の遅いワークフローを、**AI**が効率化します。
達成した数値
**JPL**の詳細によると:
- 2025年12月8日:約210メートル前進
- 2025年12月10日:約246メートル前進
合計400メートル超。従来とは異なり、waypointsベースの計画で精密地形を走行。エラー許容度の低い環境での成功が重要です。
AIの探査分野進展を示す成果
「このデモンストレーションは、私たちの能力がどれほど進化したかを示し、他の世界を探査する方法を拡大します。」と**NASA**管理者の**Jared Isaacman**は述べました。さらに、「このような自律技術は、ミッションの効率向上、挑戦的な地形対応、地球からの距離増加に伴う科学的成果向上に寄与します。」と付け加えました。現在は限定テストですが、火星での自律運用実証として注目されます。
文脈:Claudeの位置づけ
使用されたのは**Anthropic**の**Claude**モデルで、プログラミングタスクで**ChatGPT**を脅かす存在です。開発者以外でも、Mark Gurman(Bloomberg)によると**Apple**が**Xcode**の**AI**戦略に統合。Insider情報では**Meta**がデバッグツール「Devmate」に採用しています。
El JPL de la NASA acaba de anunciar de que el rover Perseverance ha completado las primeras conducciones en otro mundo cuya ruta fue planificada por IA。





